
Elektromagnetische Wellen, wie sie von Sendern ausgestrahlt werden, sind heute sehr gut erforscht. Man kennt nicht nur die Ausbreitungsgeschwindigkeit sehr genau, sondern auch die frequenzabhängigen Eigenschaften. Die Nutzung dieser Eigenschaften in Verbindung mit erdgebundenen Sendern oder Sendernetzen erschließt uns ein Teilgebiet der Navigation.
Konventionelle Radionavigation
Heute sind fast alle modernen Schiffe und Flugzeuge mit den erforderlichen Bordinstrumenten für die Radionavigation ausgerüstet. Schon am Umfang dieser Elektronik ist ersichtlich, ob diese nur für Schönwetterausflüge oder als Hilfsmittel zur Erleichterung der Navigation angeschafft wurden, oder ob eine zwingende Notwendigkeit besteht, weitgehend wetterunabhängig, d.h. bei Nacht und Nebel, sicher an das gewünschte Ziel zu gelangen. Die Bedienung dieser Geräte wurde wegen der mit der Zeit steigenden Leistungsfähigkeit zwar etwas komplizierter, stellt jedoch kein unüberwindliches Hindernis dar. Einen modernen Videorecorder zu bedienen, kann viel schwieriger sein!
Etwas anders verhält es sich bei der Interpretation der Anzeigen. Hier ist es auf jeden Fall ratsam, dass Sie sich als "Navigator" an Bord eines Wasser- oder Luftfahrzeuges die dafür erforderlichen Kenntnisse gut aneignen, da sonst, falls Sie sich einmal darauf verlassen müssen, eine Missdeutung schnell zur Katastrophe führen kann. Ich kann nur immer wieder raten, falls diese Geräte nun einmal vorhanden sind, diese auch bei schönstem Wetter zu benützen, denn keine theoretische Einweisung oder das Lesen der Bedienungsanleitungen im Liegestuhl kann die Praxis vor Ort gänzlich ersetzen!
Wenn Sie das Kapitel über die Grundbegriffe der Navigation gelesen und verstanden haben, sollten Sie jetzt weiterhin problemlos folgen können. Auf einigen wenigen Seiten möchte ich Ihnen jetzt den langen Weg der technischen Entwicklungen bis hin zur Satellitennavigation aufzeigen, um damit die Voraussetzungen zu schaffen, die Kapitel über das eigentliche Schwerpunktthema, die Satellitennavigation, besser und leichter verstehen zu können.
Betrachten wir zunächst einmal die Radionavigationshilfen, die bevorzugt für die Luftfahrt eingerichtet wurden. Die einfachste davon befindet sich nicht auf der Erde, sondern an Bord eines Flugzeuges. Es handelt sich dabei um eine simple UKW Sende- und Empfangsanlage.
VHF-Transceiver
Die Bezeichnung Transceiver ein ist eine Verbindung der englischen Wörter für Sender (Transmitter) und Empfänger (Receiver). Dieses normalerweise für den Sprechfunk vorhandene Gerät kann dazu benützt werden, mittels Fremdpeilung die Richtung zu einem bestimmten Punkt festzustellen, genauer gesagt, feststellen zu lassen. Der dafür notwendige Peilempfänger (VDF = Very-High-Frequency Direction Finder) befindet sich in der Regel auf einem Landeplatz oder einem Flughafen.
Der Pilot kann z.B. der Luftfahrtkarte oder dem Luftfahrthandbuch (AIP = Aeronautical Information Public) nicht nur die Frequenz des Flug- oder Landeplatzes entnehmen, sondern auch Informationen über das evtl. Vorhandensein eines VDF. Nach mündlicher Kontaktaufnahme (oder auch schon währenddessen) stellt der bodenständige Peilempfänger fest, aus welcher Richtung die Funksignale bei ihm eintreffen. Diese wird sofort als Gradzahl auf einem Display angezeigt und kann somit auf Anforderung dem Piloten mündlich als QDM (QDM = missweisender Steuerkurs zu dieser Peilanlage) übermittelt werden. Eine Entfernungsbestimmung ist mit dieser Methode jedoch nicht möglich.
Eigenpeilung mit ZVG
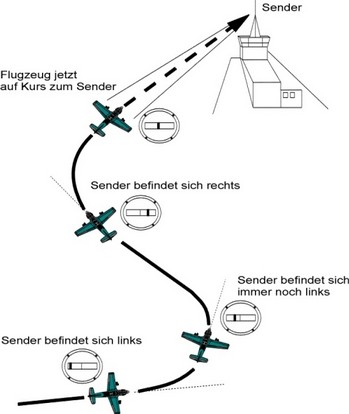
Mit einem kleinen, relativ preiswerten, bordseitigen Zusatzgerät, ist es dem Piloten möglich, auch eine Eigenpeilung durchzuführen. Dazu sind zwei UKW-Antennen in Richtung der Flugzeugquerachse angeordnet. Ein elektronischer Umschalter verbindet für den Bruchteil einer Sekunde mal die eine, mal die andere Antenne mit dem Funkgerät. Über einen Signalverstärker werden die beiden von den Antennen kommenden Signale verstärkt, gleichgerichtet und einem Messgerät zugeführt. Befinden sich die beiden Antennen in einem rechten Winkel zu der empfangenen UKW-Sendestation, kommt das Sendesignal an beiden Antennen gleichzeitig an. Man sagt, es ist "phasengleich". Der Zeiger des Messgerätes wird sich dann in der Mitte befinden. Dreht nun das Flugzeug ab, so wandert der Zeiger in die Richtung aus, in der sich die fremde Sendestation befindet, da das Sendesignal entsprechend phasenverschoben an den Antennen ankommt. Der Pilot muss gewissermaßen nur immer dem Zeiger folgen, um das Ziel, in diesem Falle die Sendestation, zu erreichen. Wählt er an seinem Sprechfunkgerät die Frequenz eines nahen Flugplatzes, hat er gute Chancen, dort anzukommen. Zusätzlich zum Anzeigegerät kann auch noch eine akustische Anzeige über einen kleinen Lautsprecher erfolgen. Dadurch hat der Pilot mehr Zeit für die Beobachtung des Luftraumes.
Diese als Zielflug-Vorsatz-Gerät (ZVG) bekannt gewordene Einrichtung ist allerdings heute kaum mehr im Einsatz, gibt es doch zwei wesentliche Unsicherheitsfaktoren: Eine Anzeige ist nur solange möglich, wie die Sendestation auf der Gegenseite eingeschaltet ist. Dies widerspricht der allgemeinen Funkdisziplin, die besagt, die Frequenz nur solange wie erforderlich zu belegen, um anderen Teilnehmern den Funkverkehr ebenfalls zu ermöglichen. Außerdem muss der Pilot die grobe Richtung zur Sendestation wissen, da die Anzeige zweideutig ist. Fliegt er genau entgegengesetzt, steht der Zeiger auch in der Mitte. Er kann dies zwar an der abnehmenden Signalstärke feststellen, bis dahin ist sein Treibstofftank jedoch vielleicht schon leer!
NDB (Non Directional Radio Beacon)
Eine weitere Navigationshilfe ist das ungerichtete Funkfeuer. Hierbei handelt es sich um Radiosender im Lang- und Mittelwellenbereich mit Frequenzen zwischen 200 Kilohertz und 1750 Kilohertz. Die große Reichweite macht eine Anwendung sowohl in der Luftfahrt als auch in der Seefahrt interessant. Mit einem entsprechenden Empfangsgerät mit der Bezeichnung ADF (ADF =AutomaticDirectionFinder), auch als "Radiokompass" bekannt, können sowohl die speziell für die Navigation eingerichteten Sender (NDBs) als auch ganz gewöhnliche Rundfunksender, die in diesem Frequenzbereich senden, empfangen werden. Die zuerst genannten sind in den Luft- und Seefahrtkarten eingezeichnet, senden eine eindeutige Morsekennung aus (in der Regel aus drei Buchstaben bestehend) und werden deshalb bevorzugt für die Richtungsbestimmung mit dem ADF verwendet.
Um einen Rundfunksender zu lokalisieren, bedarf es viel Erfahrung. Man muss die Frequenz, den genauen Standort und das abgestrahlte Programm für eine eindeutige Identifizierung kennen. Da sowohl die Kennung als auch das Rundfunkprogramm, wie bei einem Radiogerät, über Lautsprecher abgehört werden kann, ist dies jedoch möglich.
Als Anzeigegerät dient ein so genannter "RadioMagneticIndikator" (RMI). Hierbei handelt es sich um ein Rundinstrument mit einer 360-Grad - Skala, einem oder zwei Zeigern und einer feststehenden oder drehbaren Kompassrose. Bei den einfacheren Geräten mit nur einem Zeiger und einer feststehenden Kompassrose wird der Winkel zwischen der Flug- oder Fahrzeuglängsachse und dem eingestellten Sender angezeigt. Es handelt sich hiermit um eine "relative Peilung" (Relative Bearing RBI), da die Peilung nicht auf den Nordpol, sondern auf die Längsachse des (Luft)fahrzeuges bezogen wird. Um die missweisende Richtung zum Sender zu bestimmen, muss man Steuerkurs und diese Bezugspeilung addieren.
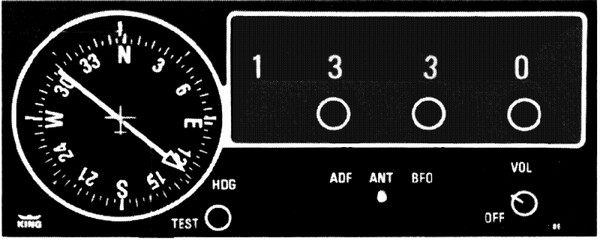
Modernere Geräte besitzen eine manuell drehbare und somit auf den Steuerkurs einstellbare oder eine von einem Kreiselkompass automatisch gesteuerte Kompassrose. Hier entfällt die Umrechnung und das QDM (missweisender Steuerkurs zum Sender) kann direkt abgelesen werden.
Auch dieses Navigationsgerät ist bestens dafür geeignet, ohne Berücksichtigung von Wind- oder Strömungseinflüssen das Ziel über eine "Hundekurve" zu erreichen.
Abb. 5.3 zeigt einen ADF-Empfänger, wie er noch in einigen Flugzeugen zu finden ist.
Zur Vermeidung von Richtungszweideutigkeiten, wie sie beim zuvor beschriebenen ZVG auftreten, werden für den Radiokompass zwei verschiedene Antennentypen verwendet. Eine Drahtantenne für den Empfang des elektrostatischen Feldes und eine Ferritantenne zum Empfang der elektromagnetischen Wellen, die beide um 90 Grad phasenverschoben am Empfangsort eintreffen. Bessere Anlagen verwenden drehbare Antennen zur Minimumpeilung (die Antenne wird so gedreht, dass das Empfangssignal möglichst schwach am Empfänger ankommt), da eine Minimumpeilung sehr viel schärfer erfolgen kann. Ohne äußere Störeinflüsse sind Genauigkeiten von 3-5 Grad erreichbar. Die Wirkung einer Minimumpeilung können Sie selbst mit einem normalen Mittel- oder Langwellen-Rundfunkgerät ausprobieren, wenn Sie die Ferritantenne (bei einem Koffer- oder Taschenempfänger das ganze Gerät) solange drehen, bis der eingestellte Sender im Rauschen verschwindet bzw. fast nicht mehr zu hören ist.
Erwähnenswert ist die hohe Störanfälligkeit dieses Systems: Während der Dämmerung entstehen durch Überreichweiten von Sendern gleicher Frequenz Interferenzen, welche die Anzeige stark verfälschen können. Regen und insbesondere starke Gewitter können bewirken, dass die Richtungsnadel nicht mehr auf den gewählten Sender, sondern auf das Gewitterzentrum zeigt. Selbst bei schönem Wetter sind Fehler durch Reflexion und Beugung der Wellen an Gebirgen möglich.
Um diesem Dilemma zu entrinnen, entwickelte man in den USA ein neues Verfahren, das hauptsächlich für den Kurzstreckenbereich und vorzugsweise für die Luftfahrt bis heute einen Standard setzt.
UKW - Drehfunkfeuer (VOR)
Dieses Navigationssystem besteht aus einer Vielzahl von UKW-Sendern, die auf Frequenzen zwischen 108 Megahertz und 118 Megahertz ihre Signale abstrahlen. Die voneinander unabhängig arbeitenden Stationen sind so konzipiert, dass Sie dem Benutzer den missweisenden Steuerkurs zu (QDM) oder die missweisende Peilung von (QDR) der von ihm empfangenen Station liefern. Missweisend bedeutet, dass sich die Richtung auf magnetisch (nicht geographisch) Nord bezieht. Ohne Berücksichtigung von Windeinfluss und Kompassfehler würden die vom Kompass und vom VOR-Anzeigegerät (QDM) abzulesenden Gradzahlen übereinstimmen, wenn man genau auf die Sendestation zusteuert und die Flagge des Anzeigegerätes "TO" (zur Station) signalisiert. Die Anzeigedifferenz lässt eine grobe Schätzung über die Stärke und Richtung von Wind- oder Wasserströmung zu.
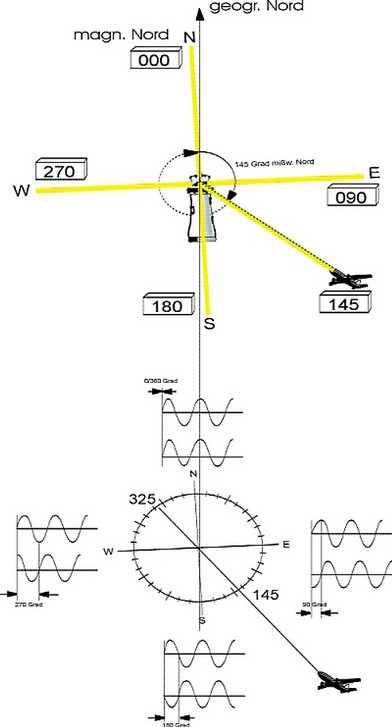
Die Arbeitsweise des komplexen abgestrahlten Hochfrequenzsignals lässt sich am Besten an einem, zugegeben primitiven, aber sicher einleuchtenden Beispiel erklären. Stellen Sie sich einen Leuchtturm vor, der sowohl einen ungerichteten Lichtblitz als auch einen kontinuierlich umlaufenden und schmal gebündelten Lichtstrahl aussendet. Immer wenn der gebündelte Lichtstrahl am (magnetischen) Nordpol vorbeikommt, zündet die ungerichtete Blitzlampe genau einmal.
Befindet sich ein Flugzeug in Empfangsreichweite dieses Leuchtturmes, empfängt es den ungerichteten Blitz unabhängig von seiner Position und startet damit eine Digitaluhr bei der Anzeige Null. Diese Uhr ist so geeicht, dass sie während einer vollen Umdrehung des gebündelten Lichtstrahls gerade auf 360 zählt.
Eine zweite Empfangseinrichtung, die nur auf den umlaufenden Lichtstrahl reagiert, soll die Uhr genau dann anhalten, wenn der Strahl am Flugzeug vorbeikommt. Befindet sich das Flugzeug im Süden der Station, bleibt die Uhr bei einem Zählerstand von 180 stehen, im Osten bei 90 und im Westen bei 270. Natürlich gilt das auch für alle anderen Zwischenpositionen. Diese Zahl entspricht somit der missweisenden Peilung QDR in Grad.
VOR-Anlagen senden natürlich keine Lichtsignale aus, sondern Radiowellen. Abb. 5.4 zeigt einmal am Leuchtturmbeispiel das Prinzip, darunter die Phasenbeziehungen der vom VOR-Empfänger auszuwertenden Signale.
Alle Punkte, die dieselbe Zeitdifferenz bzw. denselben Winkel zwischen sich und dem Bezugssignal aufweisen, bilden eine Funkstandlinie. Diese Funkstandlinie vom VOR-Sender zum Empfänger bezeichnet man als "Radial", in der umgekehrten Richtung (also zum Sender) als "Track".
Zur Auswertung dieser Signale besitzt das reale Anzeigegerät einen Stellring, einen Ablagezeiger und eine so genannte "Flagge" (ein kleines Fenster, in dem TO, FROM oder OFF stehen kann). Am Stellring (OBS=OmnidirectionalBearingSelector) dreht man so lange, bis der Ablagezeiger in der Mitte steht. Da diese Mittelstellung während einer vollen Umdrehung des Stellringes zweimal auftritt (einmal beim QDM und einmal beim QDR), muss die "Flagge" zur Interpretation mit herangezogen werden. Erscheint in diesem Fenster die Anzeige "TO", zeigt die Gradanzeige am Stellring den missweisenden Steuerkurs zu der Sendestation an (QDM). Zeigt die Flagge "FROM", ist dies als missweisende Richtung von der Station zu verstehen (QDR).
Eine dritte Möglichkeit der Flagge ist die Anzeige von "OFF". Dann ist das Signal nicht auszuwerten, weil man sich gerade zu weit entfernt, in ungünstiger Lage oder direkt über der Station befindet. Durch eine Kreuzpeilung mit zwei oder drei solcher Drehfunkfeuer und dem Einzeichnen der ermittelten Peilungen in die Karte erhält man sehr genau seine Position.
In der Praxis beträgt die Umlaufgeschwindigkeit des elektronischen Strahls 30 Hertz, d.h. 30 Umdrehungen pro Sekunde. Diese für eine elektronische Einrichtung relativ niedrige Frequenz beruht auf der historischen maximal möglichen mechanischen Drehzahl einer Antenne für das umlaufende Signal. Heute wird diese Drehung nicht mehr mechanisch, sondern mittels eines elektronischen Goniometers erzeugt, dessen Ausgänge zwei gekreuzte Dipole oder zwei um 90 Grad versetzte Rahmenantennen speisen.
Doch auch das Gute kann man noch besser machen. So wurde auch dieses Navigationssystem im Laufe der Zeit immer weiter verbessert. Das größte Problem dabei war, eine Methode zu finden, welche die bei diesen Frequenzen durch Reflexionen an Hindernissen auftretenden Fehler vermindern kann und bei der dennoch die Kompatibilität zu dem vorhandenen System bestehen blieb. Das Ergebnis war das bis heute in großem Umfang für die Luftfahrt eingesetzte Doppler-VOR (DVOR). Es liefert zum legendären VOR äquivalente Signale, so dass keine Umstellung bei den Bordgeräten nötig ist. Der senderseitige Aufwand ist beim DVOR zwar sehr viel größer, die Vorteile der höheren Genauigkeit wiegen dies jedoch auf.

Beim Doppler-VOR wird nicht nur ein Antennenpaar benützt, sondern eine ganze Armada von Antennen, die entlang eines Kreises mit einem Durchmesser von ca. 14 Metern (frequenzabhängig) angeordnet sind. Die Rotation des umlaufenden Strahles wird nun dadurch erreicht, dass die einzelnen Antennen nacheinander überlappend so gespeist werden, dass der Strahlungsschwerpunkt mit den geforderten 30 Hertz rotiert. Vom Flugzeug aus gesehen steht der Strahlungsschwerpunkt und somit der Sender nicht mehr still, sondern bewegt sich mal um den halben Durchmesser der Antennenanordnung vom Flugzeug weg, mal darauf zu, und dies genau dreißig Mal in der Sekunde. Wie wir alle wissen, erhöht sich der Ton eines pfeifenden Zuges bei seiner Annäherung und nimmt wieder ab, wenn er an uns vorbeigefahren ist und sich entfernt. Durch diesen von dem österreichischen Physiker Christian Doppler (1803 bis 1853) entdeckte und nach ihm benannte Doppler-Effekt entsteht eine azimutabhängige Frequenzmodulation, die zusammen mit der von der Mittelantenne ungerichteten und mit dem Bezugssignal amplitudenmodulierten Trägerwelle zur Auswertung herangezogen wird.
Abb. 5.5 zeigt das Doppler-VOR östlich von Karlsruhe mit der Kennung "KRH". Es arbeitet auf der Frequenz 115,950 MHz.
Mit den beiden bisher beschriebenen Navigationssystemen NDB und VOR können, wie wir gesehen haben, noch keine Positionen, sondern nur Richtungen ermittelt werden. Um die eigene Position feststellen zu können, müssen wir eine so genannte Kreuzpeilung durchführen.

Dazu sind mindestens zwei Bodenstationen erforderlich. Für die gleichzeitige Messung von zwei Standlinien sind entweder zwei Empfänger nötig, oder es muss die Frequenz schnell von einer Station auf die andere umgestellt werden, da sich das Flugzeug inzwischen weiterbewegt und damit ein zusätzlicher Fehler entsteht. Besser wäre es, von ein und derselben Bodenstation ein weiteres Signal zu empfangen, welches die zweite Koordinate zur Positionsbestimmung liefert. Eine Möglichkeit hierzu bietet das DME.
Abb. 5.6 zeigt Ihnen drei Generationen von Navigationsempfängern. Links sehen Sie einen VOR-Receiver aus den 50er Jahren, in der Mitte eine VOR-Anlage von 1985 und rechts den GPS-Navigator GARMIN GPS 55 AVD.
DME (Distance Measuring Equipment)
Von einem bordeigenen Sender werden Impulse im Frequenzbereich von etwa 1000 Megahertz abgestrahlt. Diese werden von einer Bodenstation empfangen, auf eine andere Frequenz umgesetzt und dann wieder zurückgeschickt. Die gesamte Laufzeit dieser Signale wird gemessen und daraus die Entfernung ermittelt. Soweit das Prinzip.
In der Praxis werden beide bodenständigen Einrichtungen (VOR und DME) räumlich zusammengefasst. Bei den Bordsystemen im Flugzeug mit seinen geringen Ausmaßen ist dies ohnehin gewährleistet. Durch die folglich gleichzeitige Ermittlung der Polarkoordinaten, die mit Rho und Theta bezeichnet werden, nennt man dieses Verfahren das Rho-Theta-Verfahren. Durch füttern einfacher Bordrechner mit diesen Daten ist es möglich, vorgegebene Sollkurse nach Anzeige zu fliegen. Von der Bedienung her zeigt dies erste Ähnlichkeit mit einem modernen GPS-Receiver.
Erst die Verknüpfung von VOR und DME schaffte die wesentliche Voraussetzung für die Flächennavigation. Kurse mussten nicht mehr direkt über die VORs führen, sondern konnten beliebig in den Bordrechner eingegeben werden durch setzen so genannter Pseudo-VORs als Wegpunkte. Dies dient auch der Flugsicherheit, da es nicht mehr zur Bildung von Luftstraßen zwingt, die eine Verkehrskonzentration über den VORs zur Folge hat, ein wichtiger Vorteil, der auch dem GPS-System zu eigen wird.
Zur Komplettierung dieser Gruppe von Navigationssystemen möchte ich noch eines erwähnen, das jedoch nur für die militärische Luftfahrt an Bedeutung gewonnen hat.
TACAN (Tactical Air Navigation)
Dieses Funknavigationsverfahren funktioniert ähnlich dem VOR/DME. Aufgrund der höheren Arbeitsfrequenz ist es jedoch genauer und raumsparender durch entsprechend kleinere Antennen. Azimut und Entfernung werden auf derselben Frequenz gemessen. Damit die mit einer VORTAC-Anlage ausgerüsteten militärischen Flugzeuge auch die zivilen VORs benutzen können, wurde diesen bodenseitig eine TACAN-Station zugeordnet. Solch eine Einrichtung wird dann folglich VORTAC -Anlage genannt. Bei einem Doppler-VOR heißt sie entsprechend DVORTAC.
Die bisher besprochenen Funknavigationssysteme werden von der Luftfahrt bevorzugt für kleinere und mittlere Entfernungen eingesetzt. Jede dieser Stationen kann alleine ihren Beitrag zur Positionsbestimmung liefern. Wir haben jedoch gesehen, dass erst eine Kombination von zwei oder drei Sendern sinnvoll erscheint.
Für die Seefahrt und für Transatlantikflüge sind die aus mehreren Sendestationen kombinierten und nach dem Hyperbelverfahren arbeitenden Navigationssysteme allein wegen den größeren Entfernungen besser geeignet.
OMEGA, LORAN und DECCA
OMEGA gehört zur Gruppe der passiven Radionavigationsverfahren und wurde für extrem große Reichweiten geschaffen. Acht auf dem gesamten Erdball verteilte und durch Atomuhren synchronisierte Stationen senden zeitlich gestaffelt auf Frequenzen zwischen 10 Kilohertz und 14 Kilohertz mit der Hauptträgerfrequenz von 10,2 Kilohertz. Als Standlinien erhält man bei dieser Methode Hyperbeln, die auf den Orten gleicher Entfernungsdifferenzen zu je zwei Sendern liegen. Die Senderstandorte bilden dabei jeweils die Brennpunkte der Hyperbelscharen (siehe auch Kapitel 2).
Da bei den Phasenvergleichsmethoden (OMEGA und DECCA) Mehrdeutigkeiten auftreten (bei 10,2 kHz alle 14,7 km ein Phasennulldurchgang), müssen diese mit einer geeigneten Methode erkannt werden. Entweder benützt man dazu ergänzend andere Navigationsmittel (Koppelnavigation, Astronavigation), oder man zählt von einem bekannten Ort aus die Phasendurchgänge, die so genannten "Lanes", einfach mit.
Eine weitere Methode zur Eliminierung der Mehrdeutigkeiten ist das Auswerten der beiden Hilfsträger mit 11,33 kHz und 13,6 kHz. Durch Differenzbildung mit dem Hauptträger lässt sich die Streifenbreite, also der Abstand der Phasennulldurchgänge verdreifachen. Damit ist in fast allen Fällen eine eindeutige Streifenzuordnung möglich.
Es sind Navigationskarten erhältlich, auf denen die Hyperbeln bereits eingedruckt und mit Zahlen gekennzeichnet sind. Entsprechend den Zahlen, die der Benutzer von seinem Bordgerät ablesen kann, muss er dazu nur noch die passenden Hyperbeln auf diesen Karten heraussuchen.
Die drei Frequenzen (Hauptträger und Hilfsträger) sind bei allen Bodenstationen dieselben. Daher darf immer nur ein Sender "On the Air" sein. Durch ein genau festgelegtes Schema ist gewährleistet, dass mit dem OMEGA-Empfänger eine eindeutige Identifizierung der Signalherkunft möglich ist. Diese Signale werden am Empfangsort nacheinander gespeichert und anschließend phasenmäßig miteinander verglichen. Ein kompletter Sendezyklus beträgt genau zehn Sekunden.
Die Genauigkeit von OMEGA ist sehr stark abhängig von der Tages- und Jahreszeit. Selbst unter Zuhilfenahme von Erfahrungswerten für bestimmte Orte liegt diese bei etwa einer Seemeile am Tag, bis zum Doppelten in der Nacht. Für bestimmte Gebiete hat man Monitorstationen eingerichtet, welche die tatsächliche Position mit der gerade erreichten vergleichen und die Differenz als Korrekturwerte auf dem normalen Funkweg zur Verfügung stellen. Dieses alte Prinzip werden Sie später auch beim GPS-System wieder finden. Dort bezeichnet man dies als Differential-GPS (DGPS).
Die acht OMEGA-Stationen befinden sich übrigens in Norwegen, Trinidad, Hawaii, den USA, Madagaskar, Argentinien, Australien und Japan. Eine weltweite Versorgung ist damit gewährleistet.
Das Standard-LORAN-A-System wurde während des 2. Weltkrieges für die amerikanischen See- und Luftstreitkräfte entwickelt. Beim diesem System werden Standlinie oder Standort durch Messung der Impulslaufzeit oder durch Messung von Impulslaufzeit und Phasenmessung (bei LORAN C und LORAN D) festgestellt. LORAN C sendet bei etwa 100 Kilohertz und ermöglicht damit die höchste Genauigkeit. Die bisher größte Ausbaustufe umfasst acht Senderketten mit insgesamt 34 Sendestationen. Innerhalb einer Sendekette mit drei bis vier Sendern ist eine phasenstarre Verkopplung mit Atomuhren vorhanden. Die Sendeleistung einer einzelnen Station liegt dabei bei etwa 3 Megawatt (3.000.000 Watt !).
Da LORAN auf der Messung der Laufzeit von Impulsen beruht, ist es eigentlich ein Radarverfahren. Mit Hilfe moderner Rechner können die gemessenen Laufzeiten direkt in Ortskoordinaten umgerechnet werden. Mit LORAN-C ist damit eine automatische Navigation möglich.
Das LORAN D-Netz funktioniert genau wie LORAN C. Es besitzt jedoch eine geringere Reichweite, da hierbei die Sendeleistungen der einzelnen Stationen erheblich verringert wurden.
Das DECCA -System wurde etwa zur gleichen Zeit in England entwickelt. Es arbeitet ebenfalls im Langwellenbereich zwischen 70 und 130 Kilohertz. Hier senden immer zwei phasenstarr miteinander gekoppelte Sender. Um die Sender voneinander unterscheiden zu können und dennoch eine phasenstarre Verkopplung zu erreichen, werden die einzelnen Frequenzen von einer Grundfrequenz von 14 Kilohertz abgeleitet und betragen jeweils ein ganzzahliges Vielfaches davon. Dadurch entstehen Standlinien gleicher Phasendifferenz bzw. gleicher Entfernungsdifferenz. Die erreichbare Positionsgenauigkeit am Empfangsort liegt bei etwa einer Seemeile.
DECCA ist für die Seefahrt und die Luftfahrt gleichermaßen geeignet. Von Philips gibt es speziell für kleine Flugzeuge ein relativ preiswertes und nur 500 g leichtes Empfangs- und Auswertegerät, den AP-Navigator. Dieses Gerät bietet mit seinem eingebauten Rechner einen Komfort, der dem kommender Satellitennavigatoren gleicht. Allerdings ist es ein reines 2D-Gerät, also nur für die Ermittlung von Längen- und Breitengrade geeignet. Außerdem erreicht es noch lange nicht die Genauigkeit, die man vom GPS erwarten darf.
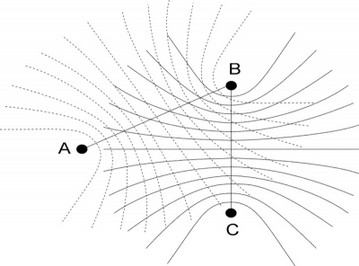
Alle drei Verfahren, OMEGA, LORAN und DECCA, haben eines gemeinsam: die Auswertung der Beobachtungsergebnisse beruht auf der Zuordnung des gesuchten Ortes zu Kurven gleicher Laufzeit- oder Phasendifferenz, die einer mathematischen Hyperbel entsprechen. Dazu sind immer zwei miteinander synchronisierte Sender, ein "Master" (Hauptsender) und ein "Slave" (Nebensender) erforderlich, die zu einer Gruppe von Sendern gehören. Zur Ortsbestimmung sind jeweils zwei Hyperbelscharen und damit zwei Senderpaare, also mindestens drei Sender nötig, wie das folgende Bild auf der nächsten Seite noch einmal zeigt. Die Auswertung dieser Hyperbeln erfolgt mit speziellen Karten, in die diese bereits eingedruckt sind. Bei der großen Reichweite von bis zu einigen tausend Kilometern spielt die Krümmung der Erde bereits eine große Rolle, was jedoch dabei bereits berücksichtigt wurde.
Bei den bisher besprochenen Navigationssystemen war immer eine fremde Station erforderlich. Man ist somit immer von einem "anderen" abhängig. Will man völlig auf sich selbst gestellt sein, muss man sich eine bordautonome, also eine eigenständige Navigationsanlage zulegen.
(Zu Abb. 5.7: Die gestrichelten Hyperbeln gehören zum Senderpaar A/B, die ausgezogenen zum Senderpaar B/C. Die Verbindungslinien der zugehörigen Sender nennt man Basislinien).
Doppler-Navigator
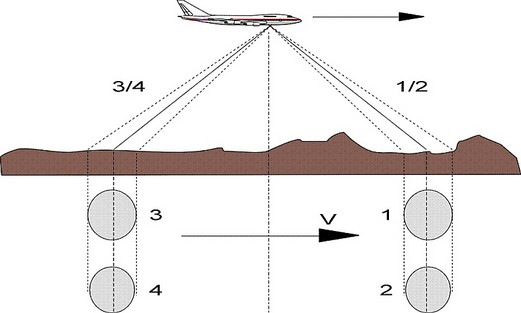
Die wichtigste Komponente eines Doppler-Navigators ist der Doppler-Sensor. Im Prinzip ist dies ein Radargerät, welches eine Mikrowellenstrahlung mit einer Frequenz zwischen 8 Gigahertz und 14 Gigahertz auf erdfeste Teile sendet und die dabei reflektierte Komponente auswertet. Das rückstrahlende Objekt ist beim Einsatz in einem Luftfahrzeug die Erde. Wie beim Doppler-VOR beschrieben, erhalten wir auch hier eine Frequenzverschiebung, deren Größe von der Geschwindigkeit des Flugzeuges abhängt. In einem Rechner wird dieser gemessene Wert zusammen mit Kurs, Quer- und Längsneigung, welche durch weitere Sensoren gemessen werden, verarbeitet. Auch dieses System ist ein Koppelnavigationssystem mit dem Nachteil der sich mit der Zeit aufsummierenden Positionsfehler. Um die Geschwindigkeit über Grund nicht nur nach dem Betrag sondern auch nach der Richtung messen zu können, werden zum Abtasten der Erdoberfläche drei bis vier schräg stehende Strahler eingesetzt.
Funkhöhenmesser
könnte man eigentlich zu den elektronischen Navigationsmessgeräten im vorherigen Kapitel zählen. Von der Technik her sind sie jedoch dem RADAR ähnlich und verwischen damit die Grenzen dieser beiden Kapitel.
Funkhöhenmesser werden ausschließlich (selbstverständlich) nur für die Luftfahrt benötigt. Da die Höhe oft konstant bleibt oder sich nur sehr langsam ändert, kommt hier das Doppler-Prinzip nicht zur Anwendung. Hier ist das CW-FM-Verfahren am weitesten verbreitet (CW=Continuous-Wave, eine kontinuierlich abgestrahlte Welle; FM=Frequenzmodulation).
Ein Sender im Bereich von etwa 4 Gigahertz wird in seiner Frequenz moduliert. Sender und Empfänger besitzen zwei gleiche Antennen, die so angeordnet sind, dass ein kleiner Teil (etwa 1/1000) der vom Sender in Richtung Erdboden abgestrahlten Energie direkt zur Empfangsantenne gelangt. In der Erwartung, dass die vom Erdboden reflektierte und zum Flugzeug zurückgestrahlte Welle etwa noch ein Tausendstel der ursprünglichen Sendeleistung beträgt, werden diese beiden Signale im Empfänger gemischt. Da durch die Modulation die beiden augenblicklichen Frequenzen durch die unterschiedlichen Laufzeiten verschieden groß sind, lässt sich eine Differenzfrequenz herausfiltern, deren Größe ein Maß für die Flughöhe ist. Das Verfahren eignet sich für Flughöhen bis zu 1500m und zur Anzeige von Steig- und Sinkgeschwindigkeiten.
Eine weitere Möglichkeit der elektronischen Höhenmessung ist das Impulsverfahren, bei dem direkt die Laufzeit eines kurzen Impulses gemessen wird, wie dies bei den Radarsystemen üblich ist. Durch die Wahl verschiedener Impulslängen lassen sich verschiedenen Messbereiche bis zu etwa 15.000m wählen.
RADAR ist ein weiteres zur Navigation eingesetztes System, welches zu den "Leitverfahren" zählt.
RADAR (Radio Detecting And Ranging)
Durch das Auswerten der rückgestrahlten kurzwelligen, meist gepulsten, Energie von einer sich drehenden Richtantenne lässt sich die Richtung, die Entfernung und bei stark gebündelter Strahlung auch die Höhe eines metallischen Gegenstandes bestimmen. Moderne Anlagen sind als Rundsichtsysteme konzipiert und mit einem entsprechenden Auswertebildschirm ausgestattet. Speicherbildschirme oder elektronische Halbleiterspeicher in Verbindung mit einem Rechner ermöglichen eine flimmerfreie Darstellung mit Einblendung von Identifizierungsmerkmalen der interessierenden Objekte. Festziele oder beliebige andere Objekte können bei Bedarf ausgeblendet werden. Die Darstellung kann sich dabei nur auf die Entfernung, die Richtung oder die Höhe beschränken, oder sie kann auch eine Kombination davon bis hin zur 3D-Auswertung sein.
Eine spezielle Radarführung, das GCA(GroundControlledApproach), wird für das bodengeleitete Anflug- und Landeverfahren von zivilen und militärischen Flugzeugen eingesetzt.
Ohne bodenseitige personelle Mitwirkung ist allerdings noch ein anderes Landeleitsystem im Einsatz.
ILS (Instrument Landing System)
Das ILS ist das heute weitverbreitetste Landesystem. Da es jedoch in die Jahre gekommen ist und die Genauigkeitsanforderungen für Landungen bei immer schlechteren Sichtverhältnissen wachsen, um den begrenzten Kapazitäten der Großflughäfen und dem wachsenden Verkehr gerecht zu werden, steht voraussichtlich für 1995 eine wichtige Entscheidung an: ILS soll ersetzt werden, entweder durch das modernere, erheblich genauere aber auch sehr teure MLS(MicrowaveLandingSystem) oder durch das Satellitennavigationssystem NAVSTAR-GPS.
Der Frederick Municipal Airport in Maryland in den USA ist der weltweit erste Flugplatz mit einem veröffentlichten GPS-Landeverfahren. Der AOPA-Präsident Phil Boyer ist der Ansicht, dass die Milliardeninvestitionen für ein MLS-Landesystem nicht verantwortet werden können, falls das GPS diese Aufgabe genauso erfüllen kann. 1250 ILS-Anlagen müssten alleine in den USA durch MLS-Systeme ersetzt werden. Dies würde etwa zwei Milliarden Mark kosten. Dazu kämen noch pro Flugzeug ca. 10.000 DM für die bordeigenen Einrichtungen. Bei einem Preis von "nur" etwa 1500 bis 3000 DM für einen GPS-Navigator bleibt nur zu hoffen, dass bei vergleichbaren navigatorischen Ergebnissen der laufenden weltweiten Versuche die Entscheidung zu Gunsten des GPS fällt, um auch dem "Otto Normalverbraucher" den Zugang zu dieser präzisen Navigationstechnik zu ermöglichen. Bei einer Massenherstellung werden die Preise in den Keller purzeln, wie wir es bei den Personalcomputern erlebt haben.
Mit einem von Trimble entwickelten und 1993/94 am Frederick Municipal Airport getesteten Differential-GPS soll die Genauigkeit und Zuverlässigkeit von Landeanflügen nach CAT 1 (Sicht mind. 1000m und Wolkenuntergrenze nicht unter 70 Metern) getestet werden. Laut Herstellerangaben soll eine horizontale Genauigkeit von einem bis drei Metern und eine vertikale von zwei bis fünf Metern nachgewiesen worden sein. Und auch in Deutschland wurden bereits 1989 am Flughafen Braunschweig von der Technischen Universität automatische Landungen mittels GPS öffentlich demonstriert.
In diesem Kapitel habe ich versucht, Ihnen einen ganz groben und allgemeinen Überblick über die Radionavigation zu vermitteln, wie sie bis heute praktiziert wird. Für weitergehende Informationen zu diesem Thema empfehle ich Ihnen die im Literaturverzeichnis aufgeführten Bücher. Falls für Sie die Navigation bisher noch Neuland war, werden Sie beim Lesen des eigentlichen Schwerpunktthemas "Satellitennavigation, heute und morgen ...", mit dem ich nun beginnen möchte, sicher von dem bis hierher Geschriebenen profitieren können.