
In diesem Kapitel möchte ich Ihnen nun zeigen, wie genau und zuverlässig ein handelsüblicher GPS-Empfänger die Position ermitteln kann. Um Messungen bezüglich der Positionsgenauigkeit durchführen zu können, benötigte ich dazu ein Gerät mit einem Datenausgang. Weiterhin war unbedingte Portabilität und Mobilität erwünscht, d.h. das Gerät sollte eine eigene Stromversorgung (Batterien oder Akku) besitzen und dennoch klein und handlich sein und es sollte ebenso einfach in ein Kraftfahrzeug, ein Schiff oder ein Flugzeug eingebaut werden können.
Diesen Wünschen kam mein GARMIN GPS-55 AVD sehr entgegen. Zwar kann es nicht, wie seine größeren Brüder, Daten entgegennehmen, wodurch eine Programmierung per PC sehr bequem wäre. Für meine Experimente hatte es jedoch alle genannten Eigenschaften aufzuweisen.
Inzwischen hat GARMIN weitere Typen auf den Markt gebracht. Vielleicht würde ich mir heute ein komfortableres, mit grafischer Anzeige zulegen, zumal die Preise drastisch gesunken sind. Doch mit welchen technischen Geräten ist es nicht so, daß es immer etwas besseres, billigeres, schöneres gibt und immer wieder geben wird?
Das GPS 95 z.B. besitzt anstelle reiner alphanumerischer Anzeigen eine Vollgrafikanzeige und kann daher z.B. Länge und Richtung von Landebahnen mehr oder weniger stilisiert darstellen. Dafür scheint mir das Gerät zu speziell auf die Anwendung in einem Luftfahrzeug abzuzielen. Außerdem ist der Kontrast einer grafischen LCD-Anzeige technisch bedingt nicht so gut wie bei den alphanumerischen Standardanzeigen. Wer dies jedoch akzeptiert und den fast doppelt so hohen Preis nicht scheut, für den ist das GPS 55 eine brauchbare Alternative.
Wie ich bereits erwähnte, möchte ich keine Empfehlungen für ein bestimmtes Modell geben. Dafür gibt es einfach zu viele. Und es ist wohl kaum jemandem möglich, alle Geräte mit all ihren Eigenschaften so gut zu kennen, daß eine allgemeine Empfehlung gegeben werden könnte.
Der beste Weg, sich vor dem Kauf eines GPS-Navigators umfangreich zu informieren, ist der Kontakt mit einem Anwender, der bereits seine Erfahrungen damit gesammelt hat. Vorführungen, wie sie von den Distributoren angeboten werden, können zwar sehr informativ sein. Man sollte jedoch nicht vergessen, daß diese Verkäufer davon leben und deshalb bevorzugt die Systeme anbieten, die ihnen die besten Gewinne versprechen.
In diesem Buch soll es deshalb ausschließlich um die Technik der satellitengestützten Navigation, der prinzipielle Anwendung eines GPS-Empfängers und um meine eigenen damit gemachten Erfahrung in bezug auf Zuverlässigkeit und Bedienung gehen.
Ich habe mich nun einmal (1992) für das GARMIN GPS 55 entschieden. Deshalb habe ich alle meine eigenen Erfahrungen ausschließlich mit diesem Gerät gewonnen. Bemerkungen über andere Fabrikate und Modelle stammen aus meinen Gesprächen mit anderen Anwendern, meinen Besuchen auf verschiedenen Messen (Aero in Friedrichshafen am Bodensee, der Internationale Luftfahrtausstellung, zuletzt in Berlin) und aus einschlägiger Fachliteratur.
Where Am I ?
Die Genauigkeit der von einem GPS-Empfänger festgestellten Position ist das Schlüsselmerkmal aller GPS-Navigatoren. Für die Positionsbestimmung bei einem Überlandflug mit einem Motor- oder Segelflugzeug sind 100 m daneben für uns Privatpiloten kein Thema, da man sich immer wieder darüber im Klaren sein muß, daß hier das GPS (zumindest bis heute) nur eine Navigationshilfe darstellt, wie ich schon mehrmals erwähnte. Unter Berücksichtigung von Sichtflugbedingungen und Fluggeschwindigkeit wären hier eine Genauigkeit von 200m bis 300m für den VFR-Flieger genau genug.
Für den Skipper eines Segelschiffes, der im Nebel eine Hafeneinfahrt von einigen Metern Breite finden muß, genügt dies jedoch nicht. Und welcher Privatanwender kann schon die Vorteile des doch noch relativ teuren Differenzmeßverfahrens (DGPS) in Anspruch nehmen?
Bei der Auswahl eines für die Schiffahrt geeigneten Empfängers, bei dem es nicht so auf die Größe, das Gewicht und den Stromverbrauch ankommt, wie dies für die Verwendung in einem Flugzeug der Fall ist, sollte man sehr sorgfältig vorgehen, ebenso bei der Wahl des Antennenstandortes. Hier ist die Inanspruchnahme einer Fachwerkstatt bzw. eines Fachbetriebes anzuraten. Beim Einbau in ein privates Luftfahrzeug muß das Gerät eine BZT-Zulassung besitzen und von einem luftfahrttechnischen Betrieb eingebaut werden bzw. der Einbau überprüft worden sein.
Als ich mir mein Gerät zulegte, war eine Zulassung dafür zwar (lt. Lieferant) beantragt, jedoch noch nicht erteilt. Für die Dauer meiner Experimente hatte ich jedoch aufgrund meines Berufes und meiner sonstigen Lizenzen eine befristete Ausnahmegenehmigung. Außerdem war bei den meisten Flügen immer ein Beamter der Telekom, der selbst aktiver Pilot ist, mit an Bord. Weitere Informationen über die z.Zt. gültigen Bestimmungen können Sie im Kapitel 13 nachlesen.
Wie genau mißt das GPS 55 AVR die wahre Position nun wirklich? Um dies einmal selbst festzustellen, habe ich folgendes Experiment durchgeführt:
Zunächst habe ich mit einem 12V-Netzgerät eine kontinuierliche Stromversorgung für das GPS 55 sichergestellt. Als Zubehör dafür ist von Garmin ein Power-Datakabel erhältlich, welches nicht nur die externe Stromversorgung ermöglicht, sondern auch den Zugriff auf das Dateninterface erlaubt. Die entsprechenden Leitungen habe ich mit dem seriellen Eingang (COM1:) meines IBM-kompatiblen Personalcomputers verbunden. Um möglichst viele Satelliten gleichzeitig empfangen zu können, habe ich die Antenne vom Gerät abgenommen und über ein ca. 20m langes Kabel auf einem kleinen Mast freistehend auf der Terrasse meines Hauses aufgestellt. Hier erlebte ich bereits die erste Überraschung. Am Empfänger kam kein auswertbares Signal mehr an, obwohl ich ein qualitativ hochwertiges Kabel mit geringer Dämpfung benutzt habe. Bei einer Frequenz von ca. 1,5 Gigahertz war dieses Kabel ohne Vorverstärker wohl doch zu lang.
Da die Empfangssignalstärken der einzelnen Satelliten am Display des GPS 55 in Form einer Ziffer zwischen 1 und 9 angezeigt werden können, konnte ich feststellen, daß zwischen dem Empfang mit direkt angesteckter Antenne und dem eines nur zwei Meter langen Kabels dazwischen, die angezeigte Feldstärke um eine Stufe zurückging. Deshalb habe ich das Gerät, welches in ein wasserdichtes Gehäuse eingebaut ist, frei auf der Terrasse aufgestellt und von dort aus ein zweiadriges Kabel für die Navigationsdaten zu meinem Computer gelegt.
Für die Aufzeichnungen und Auswertungen der vom GPS nach der NMEA 0183 ‑ Norm gesendeten Datenpakete, die u.a. auch die aktuellen Positionsdaten enthalten, habe ich zwei Programme geschrieben, eines in Microsoft-Quickbasic zur Aufzeichnung eben dieser Daten und eines in Microsoft-Visual-Basic zur Auswertung bzw. grafischen Anzeige derselben. Die kommentierten Quellprogramme dafür können Sie dem Anhang B entnehmen.
Das Quickbasic-Programm wurde mit dem Compiler der QB-Version 4.5 in ein ausführbares eigenständiges Objektprogramm übersetzt und kann auf einem Laptop oder Notebook ohne speziellen Hardwareanforderungen eingesetzt werden. Das Visualbasicprogramm läuft unter MS-Windows 3.1 und ermöglicht die grafische Darstellung der aufgezeichneten Positionen.
Diese Programme sind nur ein erster Versuch, ein Gefühl für die Positionsgenauigkeit zu entwickeln. Wer gerne programmiert, wird hier ein großes Betätigungsfeld vorfinden. Uns sollen jedoch primär die Ergebnisse dieser Versuche interessieren.
Das Aufzeichnungsprogramm GPSEMPF1.BAS
Das Programm mit dem Namen GPSEMPF1.BAS dient der Aufzeichnung der vom GPS-Empfänger gelieferten Datensätze. Ein kompletter Datensatz, der aus mehreren Sätzen besteht, wird alle zwei Sekunden über die Datenschnittstelle des GPS 55 gesendet, vorausgesetzt, Sie haben diese bei der Personalisierung des Gerätes aktiviert. Das Empfangsprogramm isoliert daraus die Zeile, welche die gerade empfangene aktuelle Position enthält. Eine komplette Beschreibung der anderen Datensätze finden Sie im Anhang A bei der Beschreibung der NMAE-Spezifikationen.
Der hier isolierte Datensatz beginnt mit dem Header (Vorspann zur Identifizierung) "$GPGLL". Zunächst hatte ich geplant, alle Sätze aufzuzeichnen. Bei einer Meßdauer von 24 Stunden und einem Satz pro zwei Sekunden hätte dies bei der Datensatzgröße von 32 Zeichen ca. 1,38 Megabyte ergeben. Da sich oftmals zwischen den einzelnen Sätzen keine Änderungen ergaben, habe ich das Programm so umgeschrieben, daß eine Aufzeichnung nur noch dann erfolgt, wenn sich mindestens eine der beiden Koordinaten ändert. Trotz Erweiterung des aufzuzeichnenden Satzes mit einer laufenden Nummer und der Aufzeichnungszeit mit jetzt insgesamt 67 Zeichen pro Datensatz, erhielt ich 80% weniger Daten.
Die Datenblöcke habe ich von Nummer 1 an durchnumeriert und die Aufzeichnungszeit der Systemuhr des Computers entnommen. Durch eine Programmodifikation kann als Aufzeichnungszeit auch die atomuhrgenaue UTC (United-Time-Coordinated) des Satelliten genommen werden, die im $GPRMC - Satz enthalten ist.
Die relevanten Sätze werden nun in der sequentiellen Datei DATEN.GPS (oder einem beliebigen anderen Dateinamen, welcher direkt im Programm bestimmt wird) gespeichert. Eine Kontrollsummenprüfung kann vorher durchgeführt werden, ist in diesem Programm jedoch nicht vorgesehen. Allerdings wird geprüft, ob die Sätze gültig sind, d.h. auswertbare Daten enthalten. Der $GPGLL - Block beginnt mit einem $‑Zeichen und endet mit der genannten Kontrollsumme, mit der man den Block auf Fehlerfreiheit überprüfen kann.
Der Block, den das Programm auswertet, hat folgendes Format:
$GPGLL,DDMM.MM,N,DDDMM.MM,E*XX
Darin bedeuten:
$GPGLL Blockindentifier
DDMM.MM gegenwärtige Position (Breite) in Grad und Minuten
(Auflösung 1/100 Grad)
N N bei nördlicher Breite, S bei südlicher Breite
DDDMM.MM gegenwärtige Position (Länge) in Grad und Minuten
(Auflösung 1/100 Grad)
E E bei östlicher Länge, W bei westlichen Länge
* Ende der Daten
XX Kontrollsumme
Der komplette Blocksatz, der je nach Betriebsart aus einer unterschiedlichen Anzahl verschiedener Blöcke besteht, wird alle zwei Sekunden wiederholt. Die Codierung entspricht einem RS-232 ‑ Signal mit 4800 Baud, 8 Bit pro Zeichen, einem Stop-Bit und ohne Parität.
Die Auswertung mit Visual-Basic und GPS.MAK
GPS.MAK ist ein Projekt in Visual-Basic und wertet die Daten aus. Es erscheint wie abgebildet auf dem Monitor. Nach dem Programmstart kann man im Meßbereichsfeld die zu erwartenden maximalen Positionsänderungen auswählen. Im Fenster "Datenquelle" stellt man Verzeichnis und Dateinname ein. Bei "Anzahl der Meßpunkte" = 0 werden alle geplottet, bei einer anderen Anzahl eben nur die gewählten.
Das Programm errechnet nach dem Anklicken der Starttaste zunächst die mittleren Koordinaten. Diesen bilden den Koordinatenursprungspunkt. Alle anderen Meßpunkte werden relativ dazu gesetzt und mit einer Linie verbunden, damit evtl. Ausreißer sofort sichtbar sind. Mit der Taste "Plot löschen" wird der Plotbereich gelöscht. Ansonsten werden die Auswertungen übereinander gezeichnet, um bei gleichen Messungen zu verschiedenen Zeiten diese übereinander legen zu können. Durch eine kleine Programmänderung könnte man sie auch noch verschiedenfarbig darstellen, falls man das möchte. Die mittleren Koordinaten werden in den beiden Feldern rechts oben angezeigt.
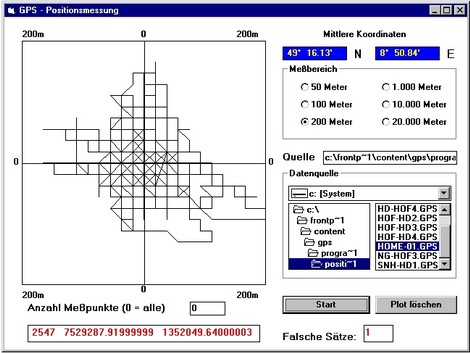
Abb. 11.1
zeigt als Beispiel einen Plot mit 1000 Meßpunkten eines stationären GPS-Empfängers. Die Meßzeit dafür betrug ca. sechs Stunden. Der Auflösung entsprechend haben die einzelnen Meßpunkte in horizontaler und vertikaler Richtung einen Abstand von jeweils 18,5 Meter (1/100 Grad).
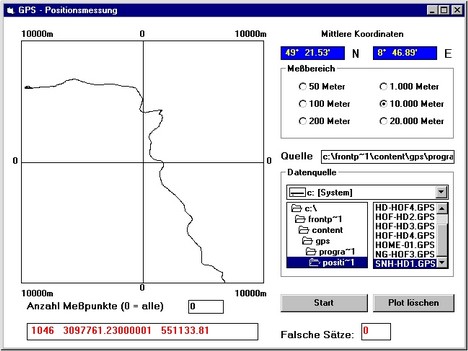
Abb. 11.2
zeigt eine während der Fahrt mit dem Auto aufgezeichneten Route. Diese führte zunächst von meiner Wohnung durch den Ort Hoffenheim auf die Hauptstraße, dann nach Sinsheim, um die Kinder in der Schule abzuliefern. Danach fuhr ich wegen des Berufsverkehrs einen etwas anderen Weg zurück auf die Hauptstraße und dann in nördlicher Richtung nach Neckargemünd, dort über die Neckarbrücke und dann rechtsseitig des Neckars nach Heidelberg.
Den entsprechenden Ausschnitt einer vorhandenen Liniennetzkarte für den Personennahverkehr habe ich mit dem Scanner unter Corel Photo-Paint eingelesen. Die aufgezeichnete Route nach Abb. 11.2 habe ich ebenfalls nach Corel importiert und zunächst von allen anderen Zeichnungsteilen befreit. Danach habe ich sie etwas dicker nachgezeichnet, damit sie sich aus der Karte deutlicher hervorhebt. Anschließend habe ich beide Bilder übereinander kopiert.
Es ist erstaunlich, wie genau die gemessenen Route mit der Karte übereinstimmt. Die kleine Abweichung nördlich der Ortschaft Mauer läßt sich mit einer Umleitung erklären, die durch den Bau eines neuen Straßenabschnittes notwendig wurde. Nördlich von Neckargemünd kann man auch deutlich sehen, daß die Fahrt über die Neckarbrücke und dann weiter rechtsseitig des Neckars erfolgte.

Was bei diesem Test natürlich nicht in die Ungenauigkeit einging, ist die vom DOD eingebaute SA (Sie erinnern sich? SA = Selective Availibility). Ich habe die gemessene Route proportional so verändert und entsprechend verschoben, daß der Start- und der Endpunkt der Messung mit den entsprechenden geographisch richtigen Positionen übereinstimmte. Damit habe ich praktisch manuell den durch die SA hervorherufenen Fehler eliminiert, der sich während der Meßzeit von etwa einer halben Stunde offenbar kaum änderte. Somit zeigt die Genauigkeit dieses Experimentes nur die Positionsfehler, die nicht von der SA herrühren. Quasi ein manuell korrigiertes DGPS!
Auf oder neben der Straße
GPS-Navigation mit dem Auto scheint ungleich schwieriger, als mit dem Schiff oder dem Luftfahrzeug. Bedingt durch starke Reflexionen der Empfangssignale, durch den eingeengten Empfang bei der Fahrt zwischen Hochhäusern, durch gebirgiges Gelände oder Täler und Schluchten, durch Brücken oder in Tunnel, in denen absolut kein Empfang mehr möglich ist, müssen die Navigationsdaten durch Referenzpunkte ergänzt werden. Über Land ist das nicht notwendig, da wird man wohl normalerweise die Straße durch eine gewisse Zwangsführung nicht verlassen. Häufen sich jedoch Abzweigungen und Kreuzungen, wie in einer Stadt üblich, können die bei der alleinigen Positionsgewinnung durch das GPS auftretenden Fehler schon mal eine falsche Straße oder Abzweigung melden. Deshalb wird man hier über Induktions-Datenschleifen, die in der Fahrbahn eingelassen sind, über z.B. an Ampeln angebrachte Infrarotsender oder Hochfrequenzssender kleiner Reichweite diese zusätzlichen Daten erhalten. Gleichzeitig kann ein Verkehrsleitsystem, da in diesem Falle die Infrastruktur für einen Datenaustausch bereits gegeben ist, gleich die Staumeldungen und Umleitungsempfehlungen mitübertragen. Erste Versuche dazu werden von vielen Automobilentwicklern bereits auf Hochtouren gefahren.